02-Acutator Control
Certainly! Below is an optimized version of the Markdown content:
Overview
Control of Servo and Motor-based Components
Module Introduction
| Actuator Drives | Description |
|---|---|
| Control a motor at a specified speed. | |
| Control two motors simultaneously. | |
| Run two motors and stop them after a specified time period. | |
| Control four motors simultaneously. | |
| Stop all running motors. | |
| Move a stepper motor a specified distance. | |
| Rotate to a specified angle. | |
| Advanced dual-motor operation for initialization. Refer to the stepper motor datasheet for parameter details. | |
| Set the wheel spacing for two stepper motors. | |
| Make the car turn at a specified degree. | |
| Set the angle for standard servos (e.g., blue 9g servos). The speed refers to the rotation speed; higher values mean faster rotation. | |
| Set the angle for Geekserver 9g servos. |
Example Programs
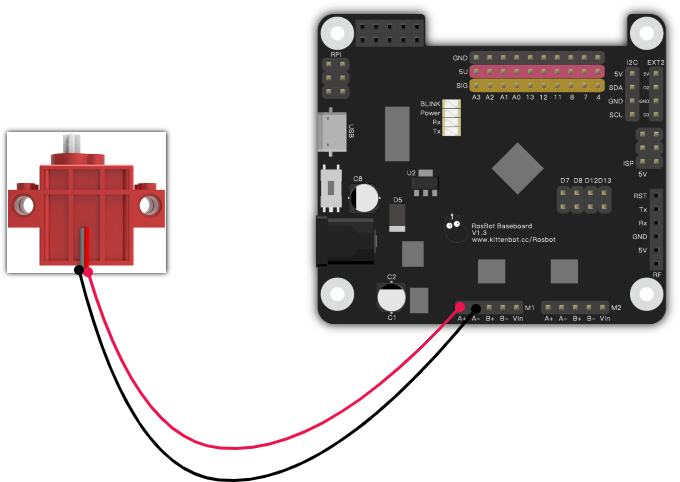
Variable Speed Motor
- Wiring
- Code

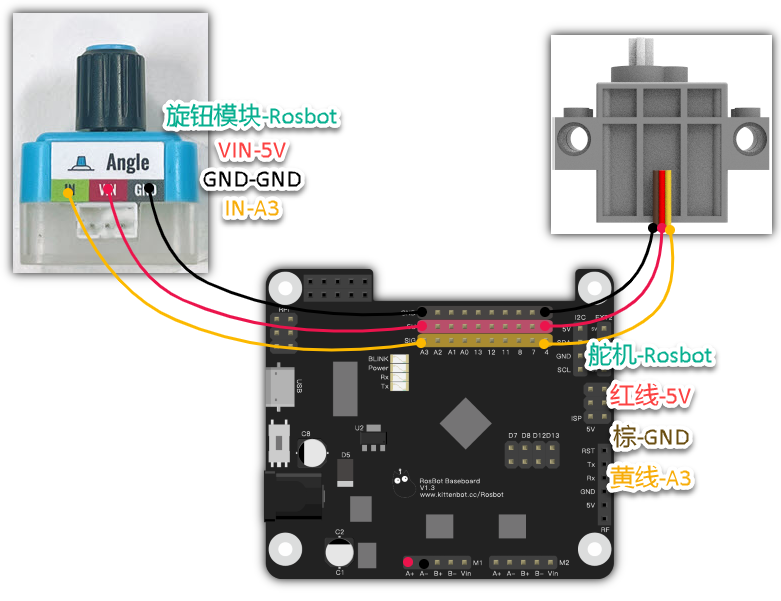
Knob-Controlled Servo
Wiring
Code
